Virtual synchronous generator for droop control
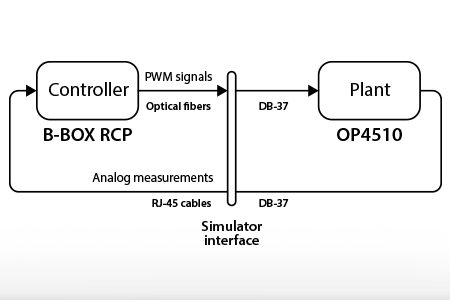
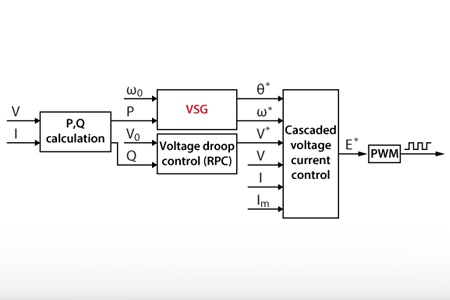
This article explains why the lack of inertia in grid-forming inverters can impact the grid and how to alleviate the issue with a virtual synchronous generator. A demonstration code example is provided and freely available. It can be tested in simulation using imperix ACG SDK and validated in the laboratory with a TPI8032 22kW programmable inverter. Stabilization…